- Picaxe 28X1 Microprocessor Project Board.This board consist of the Picaxe 28X1 Microprocessor, Motor controller and Darlington to run and control robot.
- Polycarbonate base and top platform 6mm all custom made from sheet polycarbonate, cut to size using a CNC machine
- Castor wheel, small, ball bearing castor wheel. The purpose of this is simply for lateral stability
- Sharp Infrared distance Sensors. The robot has sensors on the front, and two one side. The boards are custom made using components available from Jaycar. Infrared emitter is pulsed at 38khz using pulse width modulation (pwm) the adjacent receiver detects this frequency, which feeds back information to the microprocessor. The idea is that infrared light waves will bounce off obstacles and back to the receiver. Modulated infrared is favoured over continous because sunlight and other light sources also emit infrared, which could confuse the robot.
- Drive wheels
- Motor battery pack (9v) with voltage regulator 4.5v The motors have their own power supply.
- Picaxe battery pack (4.5v)
- Tamiya dual motor gearbox
ROBOT BUZZ LAYOUT.
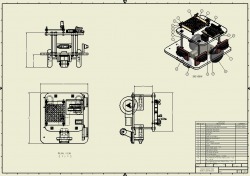
Layout design used to build robot + componets
